Ардуино головного мозга: импульсный датчик положения
Сегодня в серии публикаций про ардуино головного мозга коротенькая статья с небольшим экспериментом и парой рецептов. В комментариях к одной из моих прошлых статей меня обвинили в том, что ардуиной подсчитывать импульсы энкодера — фу так делать:
Оптически энкодер 1000/оборот и ATMega не имеющая аппаратной схемы работы с энкодером (как у серий STM32, например) — это тупик.
Дальше в комментариях было много теоретизирования, которое лучше пропустить.
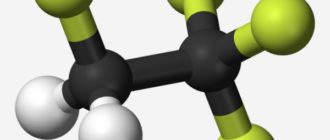
Давайте лучше попробуем протестировать в железе, насколько это тупик. Для начала, что такое инкрементальный энкодер? Тот, кто помнит эпоху до-оптических мышек, ответ знает точно. Внутри энкодера есть диск с прорезями, вот для наглядности я сделал фотографию диска с пятьюстами прорезями:
С одной стороны этого диска помещают светодиод, с другой фотодиод: Вращаясь, диск то пропускает свет на фотодиод (если прорезь напротив пары светодиод-фотодиод), то не пропускает.
При постоянной скорости вращения на выходе фотодиода получается красивая синусоида (не забываем, что поток света может быть перекрыт частично). Если этот сигнал пропустить через компаратор, то получится сигнал прямоугольной формы. Подсчитывая количество импульсов сигнала, получим насколько провернулся вал датчика. Как же определяется направление вращения? Очень просто: в датчике не одна, а две пары светодиод-фотодиод.
Давайте нарисуем наш диск, точки A и B показывают положение фотодатчиков. При вращении вала энкодера снимаем два сигнала с этих фотодатчиков: Датчики поставлены на таком расстоянии, чтобы при вращении с постоянной скоростью генерировался меандр, свинутый на четверть периода. Это означает, что когда фотодатчик А стоит напротив середины прорези, то фотодатчик B стоит ровно на границе прорези.
Когда датчик крутится (условно) по часовой стрелке, то при восходящем фронте на сигнале B сигнал A равен единице. Когда же датчик крутится в обратную сторону, то при восходящем фронте на сигнале B а равен нулю.
Это всё прекрасно, но что мне копипейстить в мой проект?
Вот это: volatile long angle = 0;volatile char ABprev = 0;const int increment[16] = {0,-1,1,0, 1,0,0,-1, -1,0,0,1, 0,1,-1,0}; ISR (PCINT0_vect) { // D8 or D9 has changed char AB = PINB & 3; angle += increment[AB+ABprev*4]; ABprev = AB;} void setup() { pinMode(8, INPUT); // A pinMode(9, INPUT); // B PCICR |= (1 0 случаться не должно. Но жизнь штука тяжёлая, и если микроконтроллер занят, то он может пропустить несколько прерываний и таки вызваться. В таком случае предлагаю ничего не прибавлять и не отнимать, так как нам явно не хватает данных; заполним недостающие клетки нулями, вот наша таблица: const int increment[16] = {0,-1,1,0, 1,0,0,-1, -1,0,0,1, 0,1,-1,0}; Теперь, надеюсь, код понятен полностью. В итоге на один период сигнала A у нас вызывается четыре прерывания, что при вращении датчика в одну сторону увеличит счётчик не на 1, но на 4. То есть, если на инкрементальном энкодере написано 2000PPR (две тысячи прорезей на диске), то реальное его разрешение составляет 1/8000 оборота.
Постойте, а что с дребезгом?
Пропуская синусоиду через компаратор, мы неизбежно получим дребезг на фронтах нашего сигнала прямоугольной формы.
Давайте возьмём лупу и посмотрим на один фронтов: Сигнал A постоянный, поэтому согласно нашей табличке, на восходящем фронте сигнала B мы добавляем единицу, а на нисходящем вычитаем.
В итоге, если мы сумеем отработать все фронты нашего дребезга, то наш алгоритм его прекрасно проглотит. И вот тут становится интересно, а сможет ли наша ардуинка отработать такие прелести? Теоретизировать можно долго, давайте ставить эксперимент.
От теории к практике
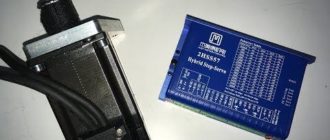
Считать импульсы будем тремя способами: Все три способа считают импульсы абсолютно одинаково, но, разумеется, хардверные способы имеют существенно большую скорость опроса сигналов. Энкодер используется Omron E6B2-CWZ6C (2000PPR).
Софтверный счётчик
Подключение простейшее, достаточно два провода от энкодера завести на ноги d8 и d9 ардуины.
HCTL-2032
Подключение hctl-2032 к ардуине выглядит примерно вот так: Чтобы не занимать все ноги ардуины, я поставил ещё 74hc165.
BeagleBone Blue
BeagleBone Blue имеет встроенный квадратурный декодер, поэтому 3.3В энкодеры можно просто завести на соответствующий коннектор. У меня энкодер имеет 5В логику, поэтому я добавил двусторонний преобразователь уровней на bss138:
Эксперимент первый
Я взял свой стенд с маятником, который уже описывал: Каретка ездить не будет, просто повешу три счётчика на энкодер маятника. Почему именно маятник? Потому что сила тяжести даёт неуплывающий маркер: каждый раз, как маятник успокаивается в нижем положении, счётчики должны показывать число, кратное 8000 (у меня энкодер 2000ppr).
Вот три счётчика, подключенные параллельно, сверху вниз: биглбон, софтверный счётчик, hctl2032.
ШИМ-драйвер для двигателя каретки в данном тесте не используется: Начало испытаний, маятник неподвижен, два монитора последовательных портов и счётчик биглбона, запущенный по ssh: Рукой делаю один полный поворот маятника, жду, пока он снова успокоится в нижнем положении: Все три счётчика показывают ровно 8000, как и положено! Хорошо, из комментариев мы вынесли, что из-за дребезга софтверный счётчик должен сильно ошибаться при низких скоростях маятника. Десять раз повторяю процедуру: качаю маятник так, чтобы он сделал один оборот, а затем жду, пока полностью успокоится. Затем снова качаю, жду, покуда успокоится. Трение низкое, одна итерация занимает пару минут, в итоге примерно полчаса работы счётчиков. Ха, а ведь опять ни один не ошибся!
Эксперимент второй
Итак, дребезг в реальности оказался не столь страшным, как казалось. Снимаю маятник, и цепляю к оси энкодера шуруповёрт: Дальше потихоньку увеличиваю обороты, периодически останавливаясь, и проверяя, насколько все три счётчика согласны с происходящим. Именно поэтому у меня в одном из окон есть оценка скорости вращения вала энкодера. 100 оборотов в минуту — порядок. 500 оборотов в минуту — порядок, согласие полное.
900 оборотов в минуту: АГА! Останавливаю шуруповёрт: Хардверные счётчики по-прежнему согласны между собой, а вот софтверный прилично отстал. Давайте считать, насколько это согласуется с теорией. Мануал на ATmega328p говорит, что обработка (пустого) прерывания — это минимум 10 тактов микроконтроллера. Работа со стеком, чуть кода внутри прерывания — это в сумме тактов 40 на одно прерывание.
8000 тысяч прерываний на 900 оборотов в минуту (15 оборотов в секунду) на 40 тактов = 4800000 тактов в секунду. В целом наша оценка весьма недалека от тактовой частоты ардуины, то есть, 1000 оборотов в минуту — это потолок для счётчика энкодера высокого разрешения на прерываниях, причём для ардуины, которая не делает ничего другого.
На 2000 оборотов в минуту оба хардверных счётчика работали без рассогласований, а больше у меня шуруповёрт выдать не может.
Подведём итог:
1. Считать на прерываниях вполне можно, 15 оборотов в секунду — это всё же весьма приличная скорость. Но если нужно обрабатывать больше одного счётчика, всё становится резко хуже. Выбор энкодера играет сильную роль, так как в хороших энкодерах подавление дребезга есть внутри, поэтому хороший энкодер и копеечный 8-битный микроконтроллер — вполне себе решение. 2.
Хардверные счётчики надёжнее, но дороже. 3. hctl2032 существенно дешевле BeagleBone Blue, но и сложнее подключается к контроллеру, а биглбон и сам себе контроллер, и умеет четыре энкодера разом обрабатывать. Да и усилитель для двигателя там уже есть на борту, поэтому стенд с маятником можно собрать вообще малой кровью.
С другой стороны, даже будучи довольно экзотичной, hctl-2032 стоит пять долларов за штуку, и может спасти ситуацию, когда схема с каким-нибудь пиком или атмелом уже есть, и сильно менять её не хочется. 4. Говорят, stm32 и дёшев, и имеет хардверный счётчик. Но цена вхождения (в смысле времени) в вопрос больно кусается.
В общем, как обычно, идеального решения нет, всё зависит от задачи и от доступных ресурсов.
Источник: https://habr.com/ru/post/340448/
Энкодеры KOYO, Omron, Nemicon, Autonics, Eltra, ELCO
Энкодеры это датчики, широко применяющиеся в промышленности для преобразования контролируемой величины – положения вращающегося объекта – в электрические сигналы. При помощи энкодеров, например, можно определить положение вала электродвигателя.
Энкодеры широко применяются в продукции станкостроительных заводов, робототехнических комплексах, системах технологического и промышленного контроля, а так же во всевозможных измерительных устройствах, требующих высокоточной регистрации угловых перемещений объекта (наклонов, поворотов, вращения).
По физическому принципу работы выделяют фотоэлектрические и магнитные энкодеры.
Фотоэлектрические энкодеры
Фотоэлектрические энкодеры используют фотоэлектрический эффект — явление испускания электронов веществом под действием света. Во время работы фотоэлектрического энкодера происходит непрерывное преобразование света в электрический сигнал. Синонимы – оптоэлектронный, оптронный и оптический энкодер.
По сравнению с приборами на другом физическом принципе действия, фотоэлектрические энкодеры более требователены к технологии производства, условиям эксплуатации, размерам конструкции и т.д., однако обладют большим потенциалом по точности и разрешению.
Магнитные энкодеры
Магнитные энкодеры используют эффект холла — явление возникновения разности потенциалов при помещении проводника с постоянным током в магнитное поле.
По точности и разрешению магнитные энкодеры уступают, например, фотоэлектрическим, однако просты в реализации, менее требователены к условиям эксплуатации и размерам конструкции.
По общему принципу работы выделяют инкрементнальные и абсолютные энкодеры.
Инкрементальные энкодеры
Инкрементальный энкодер относится к классу импульсных датчиков. При вращении объекта на его выходах появляются импульсы. Их количество пропорционально углу, на который повернулся объект. Синонимы – импульсный и инкрементный энкодер.
Инкрементальные энкодеры чаще всего применяются в станкостроении, в качестве угловых датчиков, осуществляющих высокоточную регистрацию углового перемещения вала, а так же в автоматических системах в цепях обратной связи в качестве импульсного датчика скорости вращения вала.
Абсолютные энкодеры
Абсолютный энкодер относится к классу абсолютных датчиков положения. На его выходах появляется цифровой код, определяющий текущее положение объекта (текущее значение угла).
Как правило, оптическая схема и электронная обработка сигналов в абсолютных энкодерах сложнее, чем, например, в инкрементальных энкодерах. Однако абсолютные энкодеры выдают код положенния (текущее значение угла), а это свойство часто является обязательным для работы системы.
Источник: https://www.elinc.ru/mall/encoder/
Энкодеры. Виды и работа. Особенности и применение
Коротко энкодеры можно назвать преобразователями угловых перемещений. Они служат для модификации угла поворота объекта вращения, например, вала какого-либо механизма, в сигнал электрического тока. При этом определяется не только угол поворота вала, но и его направление вращения, а также скорость вращения и текущая позиция относительно первоначального положения.
Наиболее популярными энкодеры стали при их использовании в системах точного перемещения, на станкостроительных заводах, в производственных комплексах с применением робототехники, в измерительных устройствах, в которых необходима регистрация точных измерений наклонов, поворотов, вращений и углов.
Виды и принцип действия
Энкодеры – это датчики поворота. Простейший датчик имеет ручку, которая может поворачиваться по часовой стрелке или против нее. В зависимости от угла поворота и направления выдается цифровой сигнал, информирующий о том, в каком положении находится ручка, либо в какую сторону она была повернута.
У такого энкодера, показанного на рисунке, ручка также может применяться в качестве кнопки. Это является вспомогательной функцией конкретного вида энкодера.
По типу выдаваемых данных энкодеры делятся на две большие группы:
- Абсолютные.
- Инкрементальные.
Абсолютные энкодеры
У абсолютного энкодера весь круг поворота разделен на определенное количество секторов, чаще всего одинакового размера. Эти сектора пронумерованы. Энкодер при работе выдает номер сектора, в котором на данный момент он находится.
Поэтому он и называется абсолютным. У этого типа энкодера всегда можно определить, на какой угол относительно нулевого сектора повернут энкодер в конкретный момент, то есть, при повороте он выдает значения номеров секторов, до максимального значения.
Далее он переходит снова на ноль.
Если вал энкодера поворачивать в другую сторону, то он начнет выдавать противоположные значения. В нашем случае у него используется пять выводов для выдачи значений поворота.
У данного алгоритма имеются свои недостатки. Из таблицы 1 виден порядок выдаваемых значений n-го энкодера. Стоит обратить внимание на две последние строчки, переход от 127 на 128.
Таблица 1
Здесь меняются абсолютно все биты. В идеальном энкодере они все меняются одновременно и нет никаких проблем. Практически в реальном энкодере биты меняются быстро, однако не одновременно. И в какой-то момент на выходе энкодера оказывается совершенно произвольное значение. Так как меняются все биты, следовательно, у энкодера будет произвольное значение от нуля до всех единиц.
Справа изображен пример такого переключения. Чем это может грозить? Разберем пример. Микроконтроллер с помощью двигателя управляет валом и поворачивает его на определенный угол. В определенный момент при переключении со 127 на 128 ячейку он получает определенное случайное значение. Контроллер делает вывод, что вал находится совершенно в другом месте, в отличие от фактического места, и начинает его вращать в другую сторону, с другой скоростью и т.д.
Через определенное время микроконтроллер получает правильное значение, начинает пытаться остановить вал и вращать его в правильную сторону. Такой процесс может продолжаться долго, при условии, что такая ошибка будет встречаться часто. Такие ошибки являются нерегулярными, и вычислить их достаточно сложно.
Код Грея
Выше описанная проблема решается с помощью введения кода Грея. Особенностью кода Грея является то, что при переключении энкодера на единицу, значение кода Грея меняется также на единицу. Меняется только один вид. Это видно в таблице 2 в сравнении двоичного кода и кода Грея.
Таблица 2
Первые две строчки совпадают, но уже во второй строчке поменялся средний бит. Далее также меняется один бит. Также стоит отметить, что последний и первый код Грея отличается на один бит, то есть код Грея может зациклиться.
Преимуществом данного кода является то, что ошибка, которая рассмотрена выше, невозможна. Из недостатков можно отметить, что микроконтроллеру необходимо переводить код Грея в двоичный код для того, чтобы понять, в каком положении находится абсолютный энкодер.
Инкрементальные энкодеры
Следующим типом является инкрементальный энкодер, который имеет более простую структуру. Но при этом он не показывает конкретное место положения своей ручки. Он показывает только направление поворота, а число делений поворота должен считать микроконтроллер.
У инкрементального энкодера есть набор полосок, которые по умолчанию подключены к земле, и при повороте они замыкаются и размыкаются. Получается сигнал, изображенный на рисунке (похож на меандр). Таких круговых полосок у энкодера две. Полоски смещены на одну четверть, и сигналы также смещены между собой на четверть. Это важно, так как позволяет определить направление вращения.
Схему инкрементального энкодера можно представить по правому рисунку. Кнопки обозначают периодические подключения энкодера к земле. Так как внутри энкодер не подключается к логической единице, то необходимо снаружи самостоятельно подтянуть логические единицы через резисторы к выводу энкодера. В этом случае, когда ни одна из ножек у энкодера не подключена к земле, на ножках будет логическая единица.
Если энкодер подключил к земле какую-то ножку, то на этой ножке будет логический ноль. В спокойном состоянии у энкодера на выходе логическая единица. При начале вращения энкодера в любую сторону, то сначала один вывод подключается к земле, затем другой. Далее эти выводы по очереди отключаются от земли, и на них опять образуется логическая единица.
Определить направление поворота можно по тому, какой из выводов раньше подключился к земле. При подсчете полных циклов можно посчитать количество щелчков поворота энкодера.
Фактически у энкодера имеется четыре состояния:
- Две единицы.
- Ноль и единица.
- Ноль и ноль.
- Единица и ноль.
Три состояния, которые не равны единицам, являются неустойчивыми, и в них энкодер не может находиться. Во многих микроконтроллерах реализована функция подсчета поворотов с помощью таймеров, у которых есть определенные входы. Таймер считает на аппаратном уровне, на сколько щелчков и в какую сторону был повернут энкодер, и выдает значение. То есть, счетчик инкрементирует какое-либо число.
По изменению этого числа можно определить, на сколько щелчков был повернут энкодер. По количеству щелчков можно определить и угол поворота. Энкодер также имеет дребезг контактов, который усложняет анализ сигналов.
Оптические энкодеры
Подобный преобразователь выполнен в виде диска, зафиксированного на валу, и изготовленного из стекла. Оптический датчик поворота отличается от других видов дополнительным оптическим растором, перемещаемым при повороте вала. При этом он превращает момент вращения в световой поток, который далее принимается фотодатчиком.
Оптический преобразователь запоминает углы вращения. При этом каждому отдельному положению соответствует особый цифровой код, который вместе с числом оборотов образует единицу измерения датчика. Энкодер подключается и работает по аналогии с инкрементальным датчиком.
По характеру функционирования они разделяются на фотоэлектрические и магнитные. Принцип работы магнитных основан на использовании эффекта Холла, который был впервые открыт в 1879 году. При этом разность потенциалов появляется только при расположении провода постоянного тока в магнитное поле.
По точности и свойствам разрешения магнитный вид датчика уступает фотоэлектрическому, однако по конструкции он проще, менее требователен к условиям работы и пространству. Магнитный энкодер является прибором, который фиксирует прохождение магнитного полюса магнита при вращении, находящегося рядом с чувствительным элементом. Информация передатчика выражается в цифровом коде.
Фотоэлектрический энкодер является датчиком, работающим на основе фотоэлектрического принципа. Этот эффект наблюдается при воздействии светового потока на вещество. Этот принцип был открыт в 1887 году. При эксплуатации такого датчика происходит постоянное преобразование луча света в сигнал электрического тока.
Аналогами фотоэлектрического энкодера являются оптоэлектронный, оптический и оптронный. Эти датчики наиболее чувствительны к характеристикам изготовления, эксплуатации и другим факторам, по сравнению с другими моделями. Однако это оправдывается их повышенной точностью, в отличие от конкурентов.
Похожие темы:
Источник: https://electrosam.ru/glavnaja/slabotochnye-seti/oborudovanie/enkodery/
Энкодер: что это такое, принцип работы, виды, для чего используется
Наиболее важный параметр прибора – число импульсов, которые образуются в течение совершения одного оборота. Это так называемая разрядность энкодера. Иногда ее еще называют разрешением или разрешающей способностью. Как правило, параметры разрешающей способности равны 1 024 за каждый оборот.
https://www.youtube.com/watch?v=tf0zHkglj1g
Среди прочих важных конструктивных параметров выделяют:
- Рабочее напряжение на устройстве.
- Тип вала – он может быть как пустым, так и сплошным.
- Размеры вала и отверстия.
- Способ выхода.
- Габариты корпуса устройства.
- Метод крепления.
Разновидности энкодеров
Любой энкодер представляет собой поворотный датчик. Самая простая его конструкция оснащается ручкой, которая может осуществлять повороты в разные стороны. От того, на сколько углов было совершено вращение, а также от направления вращения и будет зависеть цифровой сигнал на выходе.
Эти устройства принято разделять по таким критериям:
- инкрементные и абсолютные;
- оптические, магнитные и механические.
Энкодер инкрементного типа образует импульсы, которые определяются устройством считывания информации. Это и позволяет им определять положение того или иного объекта, а также подсчитывать количество импульсов.
Когда устройство приводится в работу, настоящее положение целевого объекта еще неизвестно. Для того чтобы подключилась система отсчета, используется нулевая отметка. Через нее вал проходит после включения энкодера.
При всех своих плюсах, данная разновидность устройств имеет некоторые недостатки. Например, то, что определение пропуска импульсов от преобразовательного устройства невозможно. Порой это способствует накоплению ошибок во время определения угла поворота. Чтобы избежать этого, применяют пару каналов измерения – синусные и косинусные.
Абсолютные энкодеры имеют специальный поворотный круг, который разделен на специальные секторы, как правило, имеющие одинаковые размеры и пронумерованные. Когда устройство включается в работу, выдается тот или иной номер сектора, где оно находится в данный момент. Отсюда и название – абсолютный энкодер. Данная конструктивная особенность позволяет быстро определить как угол, так и положение, а также направление вращения. Данные параметры определяются относительно нулевого сектора диска.
Абсолютные угловые датчики не требуют соединения системы отсчета с нулевым значением. Для начала определения положения и иных показателей в них применяется так называемый код Грея. Именно он позволяет избегать ошибок.
Можно назвать лишь один недостаток данного типа датчика – это необходимость постоянного перевода в двоичные коды для определения положения. Оптический тип датчика конструктивно предусматривает наличие оптического растрового диска, который закрепляется на вал. Когда тот вращается, формируется световой поток, затем он воспринимается фотоприемником.
Оптические энкодеры абсолютного типа – это устройства, в которых каждая позиция вала обладает своим выходным цифровым кодом, являющимся главным показателем для устройства. Согласно ему и производятся вычисления, а также закрепление параметров передвижения диска.
Существует также магнитная разновидность энкодеров, которые регистрируют движение подвижных магнитных элементов. Затем данные переводятся в определенные сигналы, понятные системе.
Наконец, механические энкодеры. Они имеют диск, изготовленный из диэлектрика, на котором нанесены выпуклые, либо непрозрачные области. Значение абсолютного угла считывается при помощи линейки контактов и переключателей. Здесь также работает код Грея. Он позволяет устранить неоднозначные интерпретации сигналов.
В качестве минусов данных типов энкодеров можно назвать разбалтывание контактов со временем. Это будет приводить к тому, что сигнал подвергнется искажению, выдавая не всегда достоверные подсчеты. Датчики оптических и магнитных моделей лишены данного недостатка.
Кроме того, различают одно- и многооборотные энкодеры. Однооборотным является датчик, выдающий показания по абсолютному значению в рамках вращения на 360 градусов, то есть внутри одного оборота. После того, как оборот будет совершен, код начинает считываться заново. Обычно датчики таких моделей находят свое применение в антенных системах, коленчатых прессах и т.п.
Многооборотные устройства, как несложно догадаться, рассчитаны на счет кодов в течение определенного числа оборотов. К примеру, для линейных проводов, либо для измерительных задач при помощи зубчатых измерительных штанг данный подход считается неприменимым. Тогда выручают датчики, которые не только измеряют углы поворотов внутри одного вращения, но и регистрируют количество вращений посредством особого передаточного устройства.
Особенности настроек и подключения
Монтажом энкодеров должен заниматься только профессиональный мастер. Они монтируются обычно на том валу, с которого считывается информация. Применяются переходные муфты для компенсации различия размеров. Корпус энкодера необходимо как можно более прочно закрепить.
Если же речь идет о монтажных работах на полом валу, то требуется прибегнуть к иному методу. В этом случае вал включается внутри датчика и монтируется внутри полой втулки. При этом сам корпус считывающего устройства закреплять не следует.
Если брать самый элементарный случай подключения, то, по возможности, следует подключить выход преобразователя к входу счетного устройства, и запрограммировать его на определенные параметры скорости.
В основном, преобразователи применяются совместно с контроллерами. К преобразователю необходимо присоединить нужные выходы. После этого программой будет автоматически определено, какое положение объект занимает в данный момент времени, какова его скорость, каким ускорением он обладает.
Характеристики
Каждая разновидность энкодера имеет свои особенности и характеристики:
- Величина импульсов, которая производится в момент одного оборота диска в процессе работы. Может варьироваться от 1 до 5 тысяч импульсов.
- Для абсолютных энкодеров важна такая характеристика, как разрядность бит или их количество.
- Тип вала, используемого в устройстве, может отличаться — он бывает с прямой осью или полый.
- Учитывается разновидность используемого фланца на валу под шпонку.
- Сигнал при выходе может отличаться.
- Уровень напряжения питания.
- Используемый тип разъема и длина кабеля.
В зависимости от сложности устройства и возможности выдерживать различные нагрузки, отличается и сфера применения. Простые датчики имеют минимальное оснащение и используются в несложных механизмах. Высокоточные устройства с высокой производительностью, защитой от температурного воздействия или взрывов применяются в промышленности и сложных технических устройствах.
Где может быть использовано устройство
Существует немало сфер и областей, в которых энкодеры нашли широкое применение. Достаточно рассмотреть наглядные примеры использования этих устройств, чтобы убедиться в их популярности:
- В механизмах, работающих для нужд печатной промышленности, эти датчики контролируют вращение валов, по которым проходит бумага и краска.
- На предприятиях, где ведется металлообработка, они задействованы при вращении валов с металлическими лентами.
- При конструировании различных моделей и устройств в области робототехники помогают контролировать движение различных частей робота.
- В автомобилестроении с помощью датчиков определяется угол поворота колеса.
- Городское хозяйство нельзя представить без лифтов – для их работы также требуются энкодеры.
- В пищевой и химической промышленности необходимо постоянно фасовать продукцию в больших объемах. Этим занимаются автоматизированные устройства, в которых установлены энкодеры.
- Даже в домашних условиях можно легко найти предмет, в котором есть энкодер — это компьютерная мышь, которая есть практически в каждой квартире.
- В различных электротехнических устройствах, например, сервомоторах, требующих высокой точности, также установлены датчики.
В зависимости от сферы использования и особенностей устройства, энкодеры могут решать различные задачи. Они измеряют угловые положения, помогают определить позиционирование объектов, детектируют положение в пространстве, могут проводить определение позиций с высокой точностью, а также измерять вращательные движения.
Источник: https://techtrends.ru/resources/articles/enkoder/
�������� ����� Lenord + Bauer
��� ����� 50 ��� ��� �������� ����� Lenord + Bauer – ���� �� ����� ������������ � ���� ������� ��������������. �������� ��������� �������� – ������� ������������� � ��������� ����������� � ���������������� ������� ���������� ���������� �����������.
����� Lenord + Bauer – ��������� ������� ��� ���������� ����������. �������� ������������� � ������� ������� – ���������� ������������ ������ ��������.
��������� ������ ������������ ���������������� � ������� ������� �������, ���������������� �������� � ���� ��������� ����� ���������� ����������� �� �� ������� � ��������� ����� ����������� ������������������ ���������.
������� ����������� �������� � ����������� ����������, ����������� ��� �� ������������, ������������ ������������ � ����� ������ �������� ���������� �����, �����, ��� �����, ��������, ��������� ����������, ������� �������� �����������.
������� ��������� Lenord + Bauer � ������� �����������, ��������, �� ��������������� � ������� ����������, � �������� ���������������, � ������������������.
������ ������ ���������, ��������������� ��������� �������� ���������� ����� Lenord Bauer, ������ ������� ��������������� �������.
������ «�������» (encoder, ��� ����� ����� ��������� ��� «��������������� � ���») � �������������� ���������� �� ��������� ������� ��� �������� �����������, ������� �� ���� ������ ��������� ������, ����� �������������� ��������� ������������: ������������������ ��������� ��� �������� ���. �������� ������� �� ��� ������� ������: ��������������� � ����������.
��������������� �������� ���������� ��������, ����� ������� ��������������� �����������. �� ������� 1 ������� ������ ����� ����������� ���������������� ��������, ������������� �� ����. ����� ��� ����������, ��������� ���. �������� ����������� �� ����� �������� ���� ���������, ������������� ����� � ������.
| ������� 1 |
���������� ��������������� ���������, ��� �������, �����, ��� � ����������, �� ��� ��������� ���������� ������ ������������� ��������� ����. �� ������ ���������, ��������, ��� ��������� �������� ��������. ���� �� ��������� ����� ���������� ���������, �� ��������������� ������� ���� ��������� �����-���� �������� ������ �������.
���������� ����� ��������������� ��������, ������� ������������ ��� �������, ��������� ����� ����� �� ���� (��������, �������������� � ����������������). ��� ��������� ���������� �� ������ ��������, �� � ����������� ��������.
���������� �������� ��������� �� ������ �������������� ��� ��� ������� ��������� ����. ������ ����� ����������� ����������� �������� ������� �� ������� 2.
������ � ����� ����� ����������� ��� �� ����� ���������, � �������� �� ���� �������, ������������� ����� ������� �����.
����� �������, �� ���� ������ ���� ������� 25=32 ������ ����, ������ �� ������� ������������� ������ � ���� �� ��������� ���� (�������, � ��������� ��������). ������ �� ����������� ����������� ����������� ��������� �������� ������������ ���������� �������.
| ������� 2 |
� ����� ������ ���������� ��������� ������, �������� ����� ���� �����������, ����������, ������������, �����������, �������������� � ��.
����� Lenord + Bauer ������������ ���� �������� �� ��������� ������� �����.
��������� MiniCODER
MiniCODER – �������������� �������� ��� ��������� ������� ��������� ��������. ��������� ������� �������� � ������������ ��� ��������� ������� ������������. ����� Lenord + Bauer ����������, ��� �� ��� ���� ��� ��������� ��������� ������ ����������� ����� ���� ����� ����������� ������ ��� ������� – ����������� ��� ����� 500 000 �����������. � ������ �� ������ ����� �������� ����������� ������� ��������� ������ ���� ���������� �������.
� ��� ��������� ������ ��������� ��������� ������ ��������, ������ �����������, ��������������� � ����������, �, ��� �����������, � ������ �����, ��������� ���� ����������� ����� ������� ������, �������� ����� ���������� ��� ��������.
������������ ����� �������� ���������� ���������� � ������������ ��� ��������� MiniCODER:
- �������� ����� � ��������� ������ ������;
- GEL 211 – ������������-��������������� ����������, ��� ������ �������� ����� �������� ��������� �������� � ����������� �� ������ ���������;
- GEL 212 – ��������������� �������������� �������� �������� � ������������� � ������������ ������������.
�������� ��������� MiniCODER �� �������� �����������, ������� ��� �� ������������ � �� ������� ������������. ����������� ���� �������� ��������������� � �������� � ������� �������� ������, ������� �� ����� ������������ � ������ �������� ������������.
��������������� ��������
��������������� �������� Lenord + Bauer ����� ����������� �������� ��������� ������. ��� ��������� ��� ������� �� ������� �� ���� 90. ��� �������� ��������� �������� ���������� � ����������� ��������, ������� �����������, ����������, ��������. ��� �� ������������ � �� ������� ������������, �� ���������� ��������� 266 ���������� (�����������) �� ������.
��������������� �������� Lenord Bauer ����������� � ����������� � ������ �������� ������ �� ����������� ���������� �����. �� ������� ��������� ����� ����� ���������� ������� ��� ������ ����������� �����, � ����������� �������� � �.�. ���������� ����� �������������� � ���������������� ����������.
���������� ��������
���������� �������� ����� Lenord + Bauer – ��� ��������� ������� �������� �����������. � ������� �� ���������������, ��� ��������� �������� ���������� � ��������� ���������������, ��� ������������� ������� ������ �������, � � ����������� ���������.
�� ���������� ����������� – ��������� �� ������ ������, ������� ��������� �������� ���������� �� 16 ��� �� ���� ������ � �� 28 ��� ��� ���������� ��������. ����������� ���������� � ��������� �� 0,08°.
��� ����� ��������� ��������� ������������ ��������������� �������� �����, ������� ����� ��� �������, ������ �� ����� ������ ��������.
���������� �������� ����� ����������� � ����������� � ������� �������� ������ �� ����������� ���������� �����. �� ����� ������������ ������������ ���� ��������� ����������� (���������� ���������������� ��������� SSI, EtherCAT, PROFIBUS-DP, 0 – 10 �, 4 – 20 ��), ������ ������������ ���� ����� ���� ������� � ������ �������, � ����� ����������� ���������� � ������� ��������� �� ����������.
������� ��������
����� Lenord + Bauer ������������� ���� ������� �������� ���������� ��� ������ ������� ������������. � ���� ������ ��������� ������ �������� ��� ����������� ���������� ������ �� ��������� ������ ��� �����, ������� ������� �� ��������������� ��� ������������������ ���������. ��� ��������� ��������� � ������� �������� �������� �������� ���������. ����� ����, ������������� ��������� ��������� �����, ��������, ��������� ���� �������� ��������.
������� � ������� �������� ������, � ����� ����������� ���������� ������������ ������������ ���������� ���������� ��������� DIN EN 50155 � ����� ������ �� IP 69 K.
�������� � ���������������
��� ����� ������������� ���������� ����� Lenord + Bauer ���������� �������� � ���������������. �������������� ������������� ������������ ������������� ���������� ���������� �������������� ����� ��� ��������� ���������.
���������� ������ �������������� �������� ������������ ������ ���� ��� ����� ��������. ������, ����� ������� �������������� ������������ � ������������ ������������. � �������� ������� ����������� ������� ����� ��������� ������������� �������� ����� GEL 290.
��������� ������ ������� ��� ��� ��������� ��������� ������������ ��� �������������� �� ������������ ������.
��� ���������� ��������� �������� ����� 290 ��������� ���������� ��� ���������������, ��� � ���������� �������. ������� ������������ ��������� ����������� ���� ����� – ��� ����������� �� ������ ��������������, �� � �������������� ����������� ������ �����������.
��������
������� – ������ ��� ��������� ����� �������� ����. �������� ����� Lenord Bauer ������������� ��� ����������� ������� � �������������� ������ ��������������� �������. ������������� ������� ��� �������� ����� �������� ���� ����� ��������������� �� ������� ������� � ������������. ������������ ������������� ���� �������� �������� ���������� ������� ��������� �����������, ������� ����� ��������������� ������������ � ����������� ��������������.
��� ��� �� ��� �������� ������ ����� ��������������, �������� Lenord + Bauer �������� ������������������, ������� �������� ��� �������� ���. ���������� ������� � ��������� � ������������� ������������� �������� ������ ���� ������ ��������� ����������� ��������������. ����� ����, ��� �������� ��������������� ��� ���������� � ������������ ������������� ������.
������ ������� ����� ���� �������� �������������, � ��� ����� ����� ���� ����� ������� ������, ��� ��������� ����� ������ ��������� ������� � ������ ������.
���������� ������ ����������� ����� ������� RFID.
����� ����������� � ������������� ������� ������ �������� ������ � ����������� �������� �������� «������».
Источник: https://tdneoteh.ru/articles/107
Абсолютный и инкрементальный энкодеры | Особенности
Энкодер (преобразователь угловых перемещений) – это электронное устройство, позволяющее с необходимой точностью измерить различные параметры вращения какой-либо детали, как правило, вала электродвигателя или редуктора.
Измеряемыми параметрами могут быть: скорость вращения, угловое положение по отношению к нулевой метке, направление вращения. Фактически энкодер является датчиком обратной связи, на выходе которого цифровой сигнал меняется в зависимости от угла поворота. Этот сигнал обрабатывается и далее подается на устройство индикации или на привод.
Применение энкодеров
Энкодеры широко применяются в промышленном оборудовании в ситуациях, когда необходима точная информация об объекте, который вращается или перемещается. Это может быть лента транспортера с какими-либо деталями или грузами, система измерения длины и проч. Энкодер позволяет цифровым способом узнать точную позицию детали или угол её поворота.
Виды энкодеров
Существуют два вида энкодеров – инкрементальный и абсолютный.
Инкрементальный энкодер по конструкции проще абсолютного и используется в подавляющем большинстве случаев. Данное устройство можно представить как диск с прорезями, который просвечивается оптическим датчиком. При вращении диска датчик включается или выключается в зависимости от того, находится ли он над прорезью или нет. В результате на выходе энкодера формируется последовательность дискретных импульсов, частота которых зависит от разрешения устройства (см. ниже) и частоты его вращения.
Для того, чтобы определять начальное положение (точку отсчета), используется нуль-метка (выход Z, Zero), которая формируется один раз на полный оборот. Для определения направления вращения у энкодеров обычно имеются два выхода (А и В), на которых импульсы сдвинуты по фазе на четверть периода. По разнице фаз можно однозначно определить, в какую сторону вращается вал.
Основным минусом инкрементального энкодера является необходимость непрерывной обработки и анализа сигналов — для этого требуется контроллер и соответствующая программа. Кроме того, чтобы узнать положение инкрементального энкодера после подачи на него питания, необходимо провести инициализацию для поиска нуль-метки.
Абсолютный энкодер имеет более сложное устройство, но позволяет определить угол поворота в любой момент времени, даже в неподвижном состоянии механизма сразу после включения питания. На выходе абсолютного энкодера действует параллельный код Грея, разрядность которого определяет разрешение, а значит и точность показаний датчика.
Основные параметры
Главный параметр любого энкодера – разрешение, то есть количество импульсов (для абсолютного преобразователя – разрядность, или количество бит) на один оборот. Довольно часто используются преобразователи с разрешением 1024 импульса на оборот.
Прочие параметры:
- напряжение питания – от 5 до 24 В
- тип вала – сплошной, полый, без вала (сквозное отверстие)
- диаметр вала или отверстия
- тип выхода – как правило, транзисторный выход с открытым коллектором
- также учитываются размер корпуса, тип крепления и степень защиты
Также учитываются размер корпуса, тип крепления и степень защиты.
Монтаж
Энкодер крепится на валу, параметры вращения которого измеряются. Для монтажа используется специальная переходная муфта, позволяющая компенсировать возможную несоосность с валом энкодера, при этом его корпус должен быть жестко зафиксирован.
Другой вариант крепежа подходит для преобразователей с полым валом. В этом случае вал, параметры вращения которого подлежат измерению, непосредственно входит внутрь преобразователя и фиксируется в полой втулке либо в сквозном отверстии. В данном случае корпус энкодера не фиксируется, за исключением какой-либо пластины или ограничителя, не позволяющей ему вращаться.
Энкодер: мастхэв производственной линии
- 15 апреля 2019 г. в 10:52
- 945
Всем привет! Кто меня не знает — я представлюсь: автор блога об электрике и электронике SamElectric.ru, активно практикующий электрик и электронщик Александр Ярошенко. Как обычно, мои статьи на страницах этого журнала тесно связаны с промышленным оборудованием. На этот раз я подробно рассматриваю энкодер — устройство, без которого не обходится ни одна солидная производственная линия.
Что такое энкодер?
Я обслуживаю парк промышленного оборудования, в котором широко применяются энкодеры. Об этом сегодня и поговорим. Разберем подключение и монтаж энкодеров, а напоследок — несколько реальных случаев их применения.
Надеюсь, что все читатели знают, что такое энкодер. На всякий случай напомню, что это электронное устройство, которое позволяет измерять скорость вращения, угловое положение либо направление вращения. Можно сказать иначе, энкодер — это датчик, который выдает сигнал в зависимости от угла его поворота.
Теоретически энкодеры бывают двух видов — инкрементальные и абсолютные. Абсолютные нужны там, где в любой момент времени (в том числе в момент подачи питания) нужно знать точное положение объекта. Но сейчас, с использованием обработки при помощи контроллеров, абсолютные энкодеры практически не используются. Тем более учитывая, что их цена в несколько раз выше, чем у инкрементальных энкодеров.
Одному полному обороту энкодера обычно соответствует 1024 различных уровня сигнала, они говорят о его угловом положении. В более совершенных моделях на один оборот приходится 2048 или даже 4096 секторов.
Как подключаются энкодеры
Подключить энкодер легко — ведь это фактически датчик с транзисторными выходами. В простейшем случае выход энкодера можно подключить ко входу счетчика, и запрограммировать его на измерение скорости.
Но чаще всего выходные сигналы энкодера обрабатываются в контроллере. А далее путем расчетов можно получить информацию о скорости, направлении вращения, ускорении, положении объекта.
Энкодеры подключают не только к контроллеру. Он также может подключаться к преобразователю частоты, питающему электродвигатель. Таким образом, появляется возможность точного позиционирования, а также поддержания нужной скорости и момента вращения двигателя без использования контроллера.
Монтаж энкодеров
По монтажу сразу скажу главное — вал энкодера должен быть надежно зафиксирован! Бывали случаи, когда из-за проскальзывания самодельных и даже штатных муфт глючили производственные линии, и мы долго не могли найти причину — ведь все остается исправным!
Вал энкодера никогда не будет соосным с вращающимся валом (вспомните, для чего нужен карданный вал). Поэтому используются специальные заводские переходные муфты, нужно надежно их крепить и периодически проверять качество монтажа.
Корпус любого энкодера всегда неподвижен. Вращается только его внутренняя подвижная часть
Существуют энкодеры с полым валом, которые надеваются непосредственно на измеряемый вал и там фиксируются. Там даже нет такого понятия, как несоосность. Их гораздо проще монтировать, и они надежнее в эксплуатации. Чтобы энкодер при этом не прокручивался, используется лишь металлический поводок. На фото ниже показан энкодер с полым валом (обозначен В21.1), надетый на вал редуктора.
Энкодер с полым валом
Производители энкодеров
Среди российских производителей энкодеров мне известен лишь только Питерский СКБ ИС, который производит энкодеры марки ЛИР. К сожалению, российского промышленного оборудования сейчас почти не производится, и ЛИРы применяются лишь в военном и лабораторном оборудовании.
По этой причине я имею дело только с энкодерами зарубежного производства. Производителей энкодеров много — их производят почти все производители полупроводниковых датчиков. Чаще всего я встречаюсь с энкодерами Autonics — как и в случае с датчиками, в России представлен большой ассортимент. Другие известные мне производители энкодеров — немецкий Sick, японский Omron, и несколько китайских брендов.
Использование тех или иных марок энкодеров обусловлены часто не техническими причинами, поскольку их параметры и надежность практически идентичны. Тут, скорее, политические мотивы — производители комплектующих любыми путями стараются, чтобы их продукция вошла в состав больших производственных линий, чтобы таким образом закрепиться на рынке.
Рассмотрим несколько примеров использования энкодеров в реальном оборудовании.
Измерение скорости полотна
Энкодер на валу
В данном примере, инкрементальный энкодер ELCO используется для измерения скорости бумажного полотна при производстве бумаги. Энкодер закреплен на бумаговедущем валу через муфту, скорость вращения которого однозначно говорит о скорости бумаги.
Минус такой установки — при механической поломке вала (а это бывало уже не раз, изнашиваются подшипники) ломается либо муфта, либо сам энкодер.
При помощи системы «энкодер+контроллер» можно вычислить мгновенную скорость, а также погонную длину произведенной продукции
Положение деталей на конвейере
В этом случае энкодер насажен на вал двигателя, подключенного через преобразователь частоты. Двигатель через редуктор передает движение на конвейер, по которому движутся заготовки деталей.
Энкодер на роторе двигателя
С помощью энкодера и оптических датчиков, фиксирующих просвет между образцами продукции, контроллер с большой точностью может управлять обработкой деталей.
По моему мнению, насаживание энкодера на вал двигателя — не очень хорошая идея в смысле того, что энкодер крутится на больших оборотах (до 3000 об/мин). Кроме повышенного механического износа, необходимо предусмотреть обработку сигналов со сравнительно высокой скоростью. Но сегодня, с развитием промышленной электроники, это не проблема.
Крепление энкодера на валу двигателя позволяет очень точно контролировать скорость привода. С появлением высокооборотистых энкодеров многие производители наладили выпуск двигателей со встроенным энкодером
Перемещение детали
Еще большую точность, чем в предыдущем случае, можно получить, если вал энкодера закрепить на ходовой винт с резьбой.
Направляющая, ходовой винт, кабель к энкодеру (сверху вниз)
Если на ходовой винт закрепить гайку, которая механически скреплена с перемещаемой деталью (в реальном примере это — металлическая заготовка), то с помощью энкодера можно до долей миллиметра узнать ее положение. Точность вычисления будет зависеть от шага резьбы и разрешающей способности энкодера.
https://www.youtube.com/watch?v=xt00o4Ybkyw
Минус такого решения — при большой скорости возможен «промах», и нужно либо уменьшать скорость при приближении к цели, либо постоянно двигаться на низкой скорости.
Перемещение упора
Зубчатая передача
Задача стоит в принципе такая же, как и в предыдущем случае. Но тут другой принцип перемещения — за счет зубчатой передачи.
Плюс данной реализации в том, что энкодер насажен непосредственно на зубчатое колесо, которое осуществляет передачу вращения.
При большом разрешении энкодера и отсутствии механических люфтов можно добиться очень высокой точности позиционирования.
Использование энкодера совместно с винтовой и зубчатой передачей позволяет достичь высокой точности обработки деталей в станках с ЧПУ
Вычисление точной координаты
В производстве полиграфической продукции иногда нужно нанести клей (или краску) в точное место. Когда печатная продукция (например, коробки или конверты) движутся по ленточному конвейеру, при помощи оптического датчика определяется начало, затем контроллер при помощи энкодера вычисляет нужную координату, и включает подачу клея.
Вычисление точной координаты
Формируется клеевая дорожка нужной длины, затем клей выключается. Далее коробка подается на фальцовочный узел, где складывается и склеивается. При этом скорость работы линии может достигать до 300 коробок в минуту.
Системы дозирования
Для точного открытия заслонки в системе дозирования жидкостей служит система, состоящая из двигателя с редуктором, на вал которого с одной стороны закреплена задвижка, с другой — энкодер.
Поворот вала
Поворот вала редуктора на угол не более 180° ограничен датчиками приближения, а точное положение определяется по сигналу от энкодера. В исходном состоянии задвижка закрыта, и датчик минимального положения активен. Это состояние принимается за ноль. Далее включается двигатель, и вал поворачивается. Точный угол поворота пропорционален количеству импульсов от энкодера обратной связи. В данном случае энкодер не делает полный оборот, его движение ограничено датчиками.
Подытожим
Энкодер является самым распространенным «измерительным инструментом» в современном промышленном оборудовании. Точнее (и дороже) его — только сервоприводы.
Источник: https://www.elec.ru/articles/enkoder-masthev-proizvodstvennoj-linii/
Принцип работы инкрементального энкодера
Импульсный (пошаговый) энкодеротносится к типу энкодеров, которые предназначены для указания направления движения и/или углового перемещения внешнего механизма.
Пошаговый (также именуемый инкрементный или инкрементальный) энкодер формирует импульсы, количество которых соответствует повороту вала на определенный угол. Этот тип энкодеров, в отличие от абсолютных, не формирует код положения вала, когда вал находится в покое.
Пошаговый энкодер связан со счетным устройством, это необходимо для подсчета импульсов и преобразования их в меру перемещения вала.
Конструкция инкрементального энкодера
Инкрементальный энкодер (он же пошаговый энкодер) состоит из следующих компонентов: источника света, диска с метками, фототранзисторной сборки и схемы обработки сигнала. Диск пошагового энкодера подразделен на точно позиционированные отметки. Количество отметок определяет количество импульсов за один оборот. К примеру, если диск поделен на 1000 меток, тогда за 250 импульсов вал должен повернуться на 90 градусов.
Диск с метками оптического инкрементного энкодера
Технология (оптическая и магнитная)
В настоящее время широко распространены две технологии исполнения — оптическая и магнитная.
1. В оптическом энкодере первичным датчиком сигнала является оптический диск (как на картинке выше). Количество черных/прозрачных секторов на диске определяет разрешение оптического инкрементального энкодера, также именуемое как количество меток в обороте.
2.
В настоящее время становятся очень популярными магнитные энкодеры. В магнитном энкодере сигнал положения вала формируется датчиком Холла.
Данная технология открывает новые возможности, например, программируемое количество импульсов в обороте, причем некоторые производители энкодеров предоставляют такую возможность (программирования) самому Заказчику, что значительно облегчает подбор энкодера для своей конкретной задачи.
Так, например, стало простой задачей заменить в оборудовании вышедший из строя энкодер с «экзотическим» числом импульсов в обороте, например, 1234 вместо более привычных 1024. В оптическом энкодере такое разрешение, как упоминалось выше, возможно только при «физическом» наличии нанесенных на диск меток.
Квадратура выхода (выходы А и В)
Для квадратуры выхода энкодера используются два выходных канала, для того чтобы определить — вращается вал по часовой стрелке или против часовой стрелки, основанное на сдвиге фазы 90°±0° , допуск ±45° — приемлемый для спецификации сдвига фазы. Энкодер с единственным выходом (A) более известен как тахометр.
Квадратура сигналов инкрементального датчика угла поворота
Максимальная частота ответа
Максимальная частота ответа является частотой, при которой вращающийся энкодер может дать электрический ответ. Такая частота имеет отношение к количеству выходных импульсов, на которые энкодер реагирует в секунду. Следовательно, энкодер пошагового типа должен удовлетворить следующее отношение:
(rpm/60) x (разрешение) ≤ максимальной частоты ответа.
Указатель нулевой отметки / импульс полного оборота (выход N)
В энкодере, имеющем этот выход, импульс на этом выходе появляется в каждом обороте вала. Функция показателя нуля может использоваться для сброса внешне связанного счетчика или для регистрации начальной (нулевой) позиции.
Разрешение
— это количество выходных импульсов за вращение вала.
Соединительный вал
Для механического соединения вала датчика с внешним механизмом следует использовать специальный гибкий соединитель (эластичную муфту), который предназначен для компенсации возможного биения валов, как в радиальном, так и в осевом направлении. Это позволяет резко снизить вероятность преждевременного износа подшипников вала датчика.
Уже незначительный, возникший в осевом направлении вала, люфт может привести к полному электрическому отказу энкодера.
Это связано с тем, что для достижения высокого разрешения, оптический диск и считывающая матрица располагаются в непосредственной близости друг от друга и минимальное осевое биение вала может привести к их механическому контакту, что в последствии приведет к разрушению нанесенных на диск меток.
Источник: https://megasensor.com/products/princip-raboty-inkrementalnogo-enkodera/
Что такое энкодер?
Контроллер (датчик) положения вращающегося объекта или по-другому энкодер — это электромеханическое устройство, с помощью которого можно определить положение вращающейся оси (вала).
У нас вы можете заказать энкодеры промышленные, а именно инкрементальные, абсолютные, оптические энкодеры
В данном устройстве механическое движение преобразовывается в электрические сигналы, определяющие положение объекта, дают информацию об угле поворота вала, его положении и направлении вращения. С помощью энкодера также можно измерить длину и расстояние или установить перемещение инструмента.
Энкодеры имеют широкую сферу применения в печатной промышленности, металлообработке, лифтовой технике, автоматах для фасовки, упаковки и розлива, в испытательных стендах, а также в роботах и прочих машинах, требующих точной регистрации показателей движения частей. Они практически полностью заменили широко распространенные ранее сельсины.
Типы энкодеров
Выделяют следующие типы энкодеров: инкрементальные (инкрементные) и абсолютные.
Инкрементальный энкодер
Инкрементальный энкодер — это устройство, которое определяет угол поворота вращающегося объекта, выдавая импульсный цифровой код. Используется для определения скорости вращения вала (оси), когда нет нужды сохранять абсолютное угловое положение при выключении питания. То есть, если вал неподвижен, передача импульсов прекращается.
Другими словами, если включить энкодер этого типа, то отсчет поворота угла начнется с нуля, а не с угла на который он был выставлен до момента выключения. Оси объекта и энкодера соединяются между собой с помощью специальной гибкой переходной муфты или жесткой втулки, либо энкодер может помещаться собственно на сам вал.
Основным преимуществом инкрементальных энкодеров является их простота, надежность и относительно низкая стоимость.
Абсолютный энкодер
Абсолютный энкодер выдает цифровой код, различный для каждого положения объекта, позволяет определять угол поворота оси даже в случае исчезновения и восстановления питания и не требует возвращения объекта в начальное положение, что является несомненным преимуществом этого типа энкодеров.
Так как угол поворота всегда известен, то счетчик импульсов в этом случае не нужен. Сигнал абсолютного энкодера не подвергается помехам и вибрации и тем самым для него не нужна точная установка вала.
Абсолютный энкодер используется в высокоточных системах: робототехника, станки с числовым программным управлением и др.
Классификация по принципу действия
По принципу действия энкодеры различают:
- оптические
- магнитные
- магниторезисторные
Оптические
Конструкция оптического энкодера состоит из специального оптического диска, светоизлучающего диода и фотодетектора. Диск с нанесенной оптической шкалой (поверхность диска состоит из прозрачных и непрозрачных участков) жестко закрепляется на валу. При вращении объекта специальный датчик считывает информацию и преобразовывает ее в импульсы.
Магнитные
Магнитный энкодер включает в себя вал с магнитом и датчиком Холла, который регистрирует последовательность прохождения магнитных полюсов (северные и южные) и измеряет скорость и направление вращения.
Магниторезисторные
Магниторезистивный энкодер состоит из катушки помещенной в магнитное поле, катушка закрепляется на валу. При вращении катушки ее витки будут изменять положение относительно поля, они будут то пералельны полю, то перпенликулярны, соответсвенно ток в катушке будут меняться. Таким образом, протекащий через катушку ток будут изменяться в зависимости от угла поворота вала.
Параметры, на которые необходимо обратить внимание при выборе энкодеров
При выборе энкодера следует обратить внимание на следующие параметры:
- Число импульсов на оборот (число бит у абсолютных энкодеров). От данного показателя зависит точность системы — чем больше импульсов тем выше точность.
- Вал, отверстие под вал (и их диаметр). От этого зависит каким образом на энкодер будет передаваться вращение, либо объект будет подсоединяться к отверстию энкодера, либо на вал энкодера будет передаваться вращение с помощью, например, зубчатой передачи или ремня.
- Тип выходного сигнала энкодера (HTL, TTL, RS422, двоичный код, код Грея, и др.). Данный параметр влияет на снятие сигнала энкодера и дальнейшую его передачу..
- Напряжение питания. От этого показателя зависит работа системы и точность снятия сигнала.
- Длина кабеля или тип разъема влияют на возможности установки рабочей системы.
- Другие требования по крепежу (необходимость муфты, монтажного фланца, крепежной штанги и др.). Данный параметр влияет на устойчивость установки и тем самым на точность системы.
- Важна также степень защиты энкодера от проникновения пыли и влаги.
Источник: https://stl-grupp.com/ru/info/what-is-encoder.html
Что такое абсолютный энкодер и когда его следует использовать
Когда вам нужно измерить скорость, направление движения или положение вращающегося вала, вам, скорее всего, потребуется поворотный датчик или иными словами энкодер. И когда приходит время выбора такого устройства, необходимо рассмотреть два основных типа: инкрементный энкодер и абсолютный энкодер.
Важное значение имеет правильный выбор, поэтому в данном материале будет приведено краткое руководство по абсолютным энкодерам, чтобы помочь вам понять, что они из себя представляют, чем они отличаются от инкрементных энкодеров, и ситуации, в которых вам может понадобиться такое устройство.
Абсолютный энкодер предоставляет точное значение о положении или данные о каждой точке вращения, представляющую «абсолютное» положение энкодера. С момента его включения абсолютный датчик может рассказать вам точное положение вращающегося вала, которое он измеряет.
Он делает это с помощью оптического, магнитного или емкостного сенсора для считывания уникального кода с диска, который вращается вместе с валом. Крайне важно, что абсолютный энкодер может сделать это без необходимости поворота вала и может отслеживать это положение даже в случаях временной потери питания.
Чем больше уникальных кодов присутствует на диске кодировщика, тем точнее будет отображаться положение.
Разрешение представляется в виде битов (двоичных цифр), которые соответствуют количеству уникальных слов данных за один оборот. Абсолютные энкодеры также имеют однооборотные и многооборотные варианты.
Однооборотные энкодеры обеспечивают позиционирование данных за один полный оборот на 360°, причем выход повторяется для каждого оборота вала.
Многооборотные энкодеры также обеспечивают позиционирование данных за один оборот, но имеют дополнительный счетчик «поворотов», который измеряет количество оборотов.
Абсолютный энкодер против инкрементного энкодера
Инкрементный датчик работает, генерируя импульсы при вращении вала. Типичный инкрементный энкодер генерирует 2 меандра с отставанием на 90 градусов по фазе. Эти импульсы должны отслеживаться или подсчитываться электроникой, внешней по отношению к энкодеру.
Разрешение представлено числом импульсов на оборот и представляет собой количество высоких импульсов, которые инкрементный датчик будет выдавать от любого из его выходов. Поскольку выход инкрементного энкодера всегда присутствует только в 1 из 4 повторяющихся состояний, энкодер должен быть привязан к известному фиксированному местоположению, чтобы обеспечить значимую информацию о местоположении.
Из исходного местоположения, часто совпадающего с индексным импульсом энкодера, можно отслеживать постепенное изменение вращения вала и определять абсолютное положение вала. Это должно происходить каждый раз, когда вы включаете инкрементный кодер или в случае временного отключения питания. Следовательно, для получения абсолютного положения требуется больше времени, и вал должен поворачиваться, чтобы обеспечить его.
Всех этих недостатков лишен абсолютный энкодер.
Впрочем, инкрементальные энкодеры менее сложны, чем абсолютные модели, и поэтому обычно менее дороги (хотя разница в цене все уменьшается). Если вы только контролируете скорость, направление движения или относительное положение, инкрементный энкодер, как правило, лучший вариант, но когда определение абсолютного положения вала является вашей основной проблемой, абсолютный энкодер – это надежное решение.
В большинстве случаев сегодня абсолютный энкодер лучше инкрементного. Во-первых, абсолютный датчик поддерживает положение вала, положение будет известно, как только вы включите его. Вам не нужно ждать завершения последовательности самонаведения или калибровки и можете получить данные о положении, которые вам нужны быстрее при запуске или после сбоя питания, даже если вал был повернут, когда энкодер был выключен.
Знание абсолютного положения при запуске может быть существенным преимуществом во многих системах, где в определенных положениях безопасно продолжать вращать вал в одном направлении, но не в другом. В зависимости от применения, неправильное использование может привести к повреждению оборудования, телесным повреждениям или, что еще хуже, летальным исходам. В таких ситуациях важно, чтобы вы знали точное положение своего вращающегося устройства до того, как какие-либо части переместятся.
Не менее важно, что абсолютный кодер обеспечивает истинное положение в реальном времени.
Поскольку все больше и больше систем становятся цифровыми с подключением к центральной шине связи, возможность опроса энкодера для определения положения в реальном времени, когда это необходимо, с минимальной задержкой, имеет большую пользу.
Чтобы отслеживать положение с инкрементным датчиком, даже после последовательности самоопределения вам нужно отслеживать все импульсы с помощью внешней схемы (как правило, посредством квадратурного декодирования). Абсолютные энкодеры генерируют уникальное цифровое «слово» для каждой позиции в заявленном разрешении.
Есть и другие преимущества абсолютных энкодеров. Системы, которые имеют абсолютные датчики, как правило, менее восприимчивы к электрическим шумам, потому что они получают положение, считывая код с проверкой ошибок или в цифровом виде по последовательной шине.
Основываясь на этом факте, можно сказать, что сравнительно просто объединить более одного абсолютного энкодера вместе с другими в одной и той же системе – возможно, для автоматизации производства или в роботизированной руке с несколькими суставами.
Если вы используете инкрементные энкодеры, мониторинг выходов с нескольких устройств может стать очень сложным, требующим значительной вычислительной мощности.
Но с абсолютными энкодерами, особенно с теми, которые вы можете связать с центральной коммуникационной шиной, вы можете получать данные от каждого отдельно, что требует гораздо меньшей вычислительной мощности для интерпретации показаний.
Области применения абсолютных энкодеров
Изложив основные различия между абсолютными и инкрементными энкодерами, давайте кратко рассмотрим некоторые конкретные сценарии, в которых используются абсолютные энкодеры.
Ключевым рынком является робототехника – быстро расширяющаяся область, охватывающая широкий спектр применения. В производстве вы найдете роботизированные руки, используемые для сборки, сварки, распыления краски и других задач. Вы также найдете их в здравоохранении. Например, удаленная хирургия требует больших количеств исключительно точной позиционной информации от роботизированных рук. Роботы для оказания помощи на дому – еще один новый вариант использования для абсолютных датчиков.
Тем не менее, это всего лишь одна область, в которой больше систем становится цифровыми, а разрыв цен между инкрементальными и абсолютными энкодерами сокращается.
Разнообразие приложений для абсолютных энкодеров становится почти бесконечным, как на промышленном, так и на потребительском рынках.
Абсолютные датчики, применяемые всюду от автоматических ворот до заводской автоматики являются высокоэффективными и все более бюджетным способом определения положения вала исполнительного механизма.
digitrode.ru
Источник: http://digitrode.ru/articles/1611-chto-takoe-absolyutnyy-enkoder-i-kogda-ego-sleduet-ispolzovat.html
Подключение энкодера к Arduino. GyverEncoder [30.01.20]
Подключение энкодера к Arduino. GyverEncoder [30.01.20]
Объект энкодера может быть создан несколькими способами:
Encoder enc; // не привязан к пину (для виртуального энкодера, см. пример) Encoder enc(пин CLK, пин DT); // энкодер без кнопки (ускоренный опрос) Encoder enc(пин CLK, пин DT, пин SW); // энкодер с кнопкой Encoder enc(пин CLK, пин DT, пин SW, тип); // энкодер с кнопкой и указанием типа Encoder enc(пин CLK, пин DT, ENC_NO_BUTTON, тип); // энкодер без кнопки и с указанием типа
Опрос
Опрос энкодера происходит в методе .tick(), после чего можно узнать состояние энкодера из методов is*. Сам .tick() должен вызываться как можно чаще:
- В loop() – у вас должен быть “прозрачный” loop() без задержек
- В прерывании таймера – достаточно опрашивать энкодер каждые 5 мс (зависит от скорости поворота)
- В аппаратном прерывании (достаточно завести одну таковую ногу энкодера)
Для “расшифровки” состояния энкодера используются следующие методы:
- isTurn(); // возвращает true при любом повороте, сама сбрасывается в false
- isRight(); // возвращает true при повороте направо, сама сбрасывается в false
- isLeft(); // возвращает true при повороте налево, сама сбрасывается в false
- isRightH(); // возвращает true при удержании кнопки и повороте направо, сама сбрасывается в false
- isLeftH(); // возвращает true при удержании кнопки и повороте налево, сама сбрасывается в false
- isFastR(); // возвращает true при быстром повороте
- isFastL(); // возвращает true при быстром повороте
Для кнопки энкодера:
- isPress(); // возвращает true при нажатии кнопки, сама сбрасывается в false
- isRelease(); // возвращает true при отпускании кнопки, сама сбрасывается в false
- isClick(); // возвращает true при нажатии и отпускании кнопки, сама сбрасывается в false
- isHolded(); // возвращает true при удержании кнопки, сама сбрасывается в false
- isHold(); // возвращает true при удержании кнопки, НЕ СБРАСЫВАЕТСЯ
- isSingle(); // возвращает true при одиночном клике (после таймаута), сама сбрасывается в false
- isDouble(); // возвращает true при двойном клике, сама сбрасывается в false
Примечание: isClick() возвращает true сразу же после отпускания кнопки, в то время как isSingle() возвращает true после таймаута, во время которого можно сделать второй клик и поймать уже двойной клик при помощи isDouble().
В версии 4.4 появился метод resetStates(), который принудительно сбрасывает все флаги is-методов
Настройки в скетче
Некоторые параметры работы энкодера можно настроить из программы:
- setType(type); // тип энкодера TYPE1 одношаговый, TYPE2 двухшаговый. Если ваш энкодер работает странно, смените тип
- setTickMode(tickMode); // MANUAL / AUTO – ручной или автоматический опрос энкодера функцией tick() (по умолчанию ручной)
- setDirection(direction); // NORM / REVERSE – направление вращения энкодера
- setFastTimeout(timeout); // установка таймаута быстрого поворота
- setPinMode(mode); // тип подключения пинов энкодера, подтяжка HIGH_PULL (внутренняя) или LOW_PULL (внешняя на GND)
- setBtnPinMode(mode); // тип подключения кнопки, подтяжка HIGH_PULL (внутренняя) или LOW_PULL (внешняя на GND)
Настройки в библиотеке
В заголовочном файле библиотеки (GyverEncoder.h) есть несколько дополнительных настроек:
Время:
- ENC_DEBOUNCE_TURN 1 // время антидребезга для энкодера, миллисекунд
- ENC_DEBOUNCE_BUTTON 80 // время антидребезга для кнопки, миллисекунд
- ENC_HOLD_TIMEOUT 700 // таймаут удержания кнопки, миллисекунд
- ENC_DOUBLE_TIMEOUT 300 // таймаут двойного клика
Использование кнопки:
- #define ENC_WITH_BUTTON // если закомментировать данную строку, опрос кнопки будет полностью “убран” из кода, что сделает его легче и чуть быстрее
Логика подключения:
- #define DEFAULT_ENC_PULL LOW_PULL // тип подключения энкодера по умолчанию (LOW_PULL или HIGH_PULL)
- #define DEFAULT_BTN_PULL HIGH_PULL // тип подключения кнопки энкодера по умолчанию (LOW_PULL или HIGH_PULL)
Алгоритмы опроса энкодера
Алгоритм работы библиотеки можно выбрать в заголовочном файле библиотеки (GyverEncoder.h), для этого нужно раскомментировать одну из строк с дефайнами алгоритмов:
- #define FAST_ALGORITHM // быстрый, не справляется с люфтами
- #define BINARY_ALGORITHM // медленнее, лучше справляется с люфтами
Источник: https://alexgyver.ru/encoder/